지난 편 에서 ROS2 Jazzy 설치까지 끝냈다. 이번엔 본격적으로 첫 노드를 작성하고, 같은 날 시간을 좀 남겨서 STM32 쪽 PWM LED 예제도 같이 했다.
Table of contents
Open Table of contents
1. ROS2 핵심 어휘 정리
본격 진입 전에 자주 보이는 용어부터 짚었다. talker, chatter 같은 단어가 자주 등장하는데, 이건 ROS 공식 튜토리얼의 관습 — talker / listener 가 예제 노드 이름, chatter 가 예제 토픽 이름이다.
| 용어 | 의미 |
|---|---|
| Node | 독립 실행 프로세스 |
| Topic | 노드 간 통신 채널 (이름 + 메시지 타입) |
| Publisher | 토픽에 메시지 보내는 쪽 |
| Subscriber | 토픽에서 메시지 받는 쪽 |
| Message | 토픽으로 흐르는 데이터 단위 (타입이 정해져 있음) |
ROS2 자체는 처음이지만 publish / subscribe 는 MQTT 작업 등에서 지겹게 다뤄봤던 패턴이라 이해는 어렵지 않았다.
ROS2 공식 패키지에는 표준 메시지 타입 이 용도별로 나뉘어 있다 (예: std_msgs, geometry_msgs, sensor_msgs…). 각 패키지 안에 해당 도메인에 맞는 메시지가 들어있다.
2. 첫 talker 노드 — chatter 토픽으로 1초마다 발행
학습용이라 Hello, World 급 예제 부터.
ros2 pkg create --build-type ament_python my_agv_pkg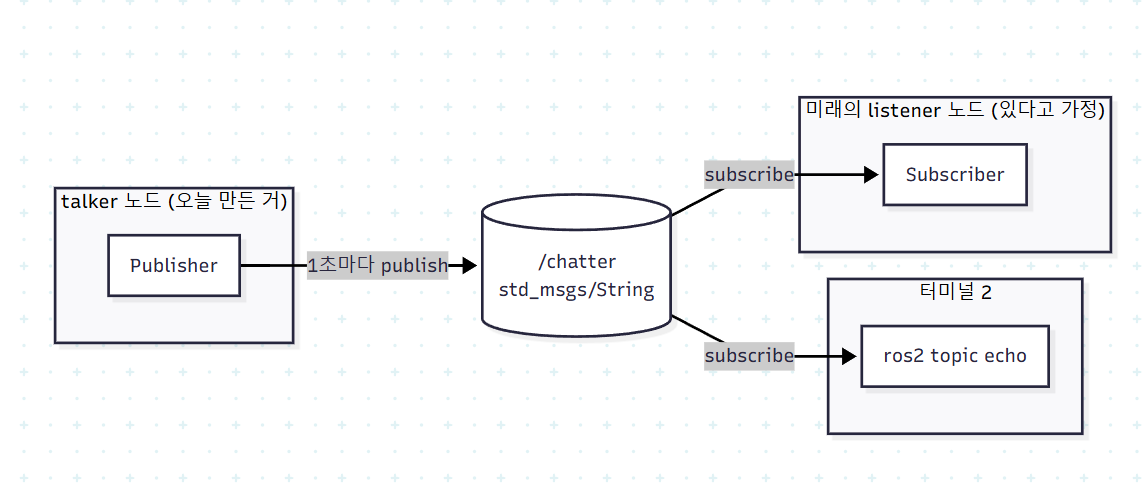
talker 노드를 만들어서 chatter 토픽에 1초마다 “Hello AGV” 를 보내게 했다.
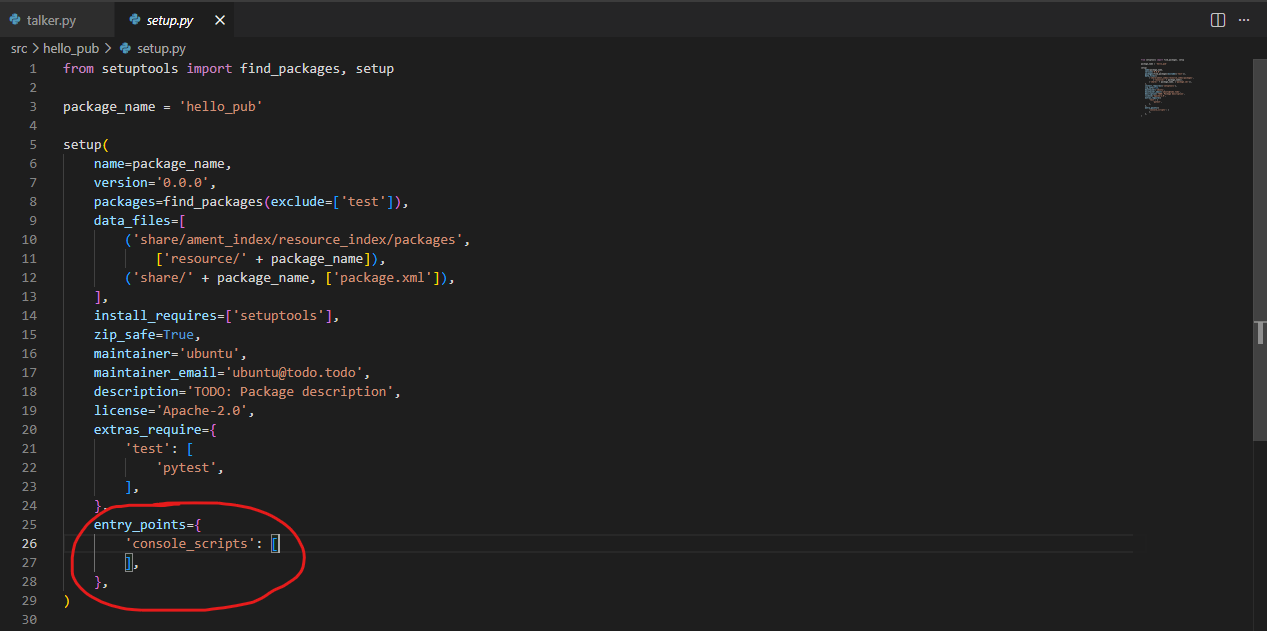
그리고 setup.py 에 실행 진입점(entry_points) 을 등록해야 ROS2 가 ros2 run 으로 노드를 실행할 수 있다.
이후 colcon build 로 빌드.
source install/setup.bash가 왜 필요한가? 빌드 후 source 를 해야 새로 추가된 패키지를 현재 쉘이 인식한다. setup.bash 스크립트가AMENT_PREFIX_PATH같은 환경변수를 export 해주는 역할.
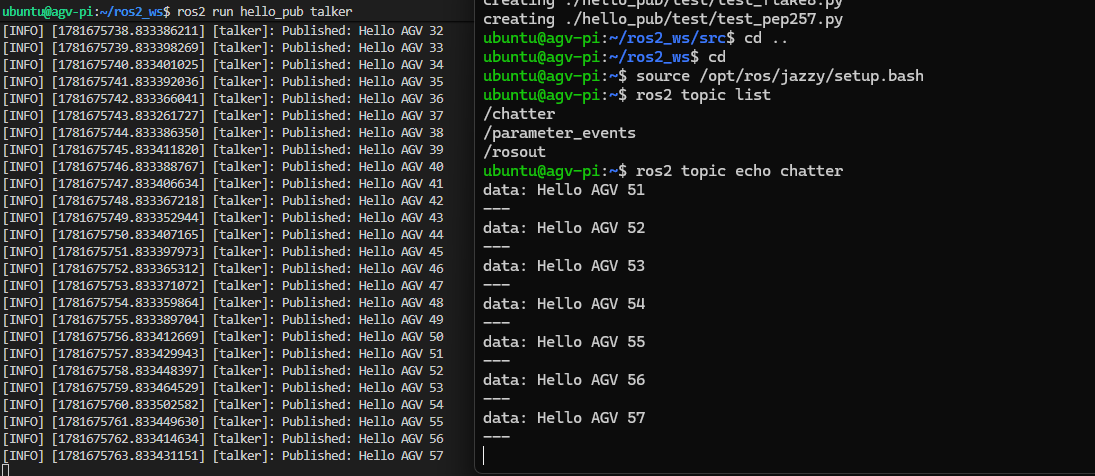
다른 터미널에서 같은 토픽을 listen 했더니 1초마다 메시지가 흘러나오는 게 확인됐다.
3. 표준 메시지 — geometry_msgs/Twist
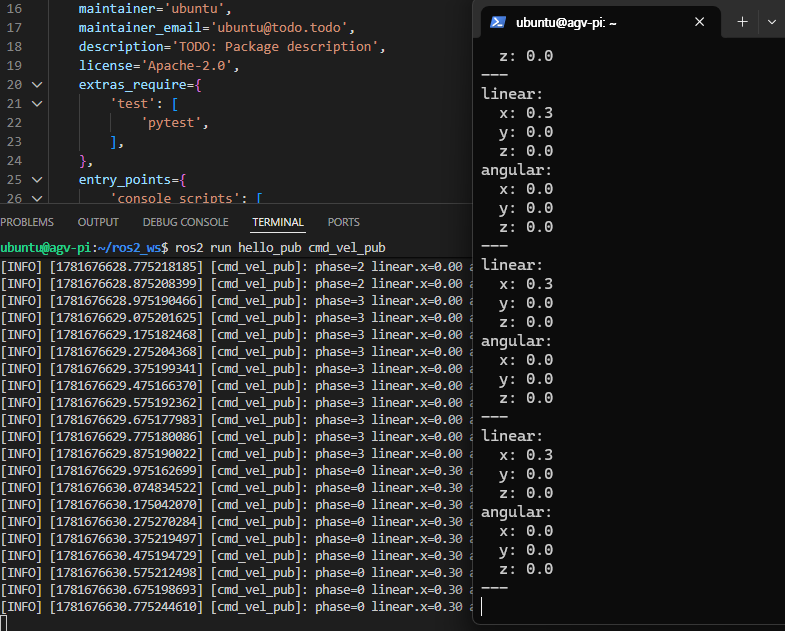
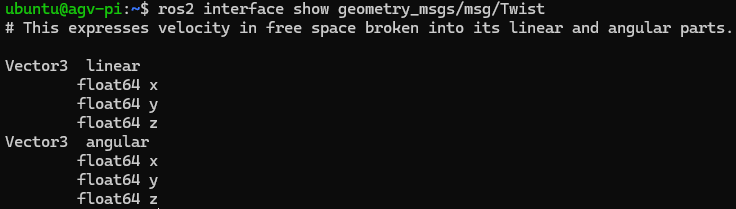
다음으로 geometry_msgs/Twist 타입을 직접 사용했다. 이건 로봇의 선속도(linear) + 각속도(angular) 를 담는 표준 메시지로, 모바일 로봇 제어의 사실상 표준.
예제 자체는 talker 와 비슷하지만 의미가 다르다. 이 메시지를 듣고 모터를 실제로 움직이려면 별도의 모터 제어 노드 가 필요한데, 그건 STM32 쪽에서 만들 예정. 지금은 메시지 발행만 하고 ros2 topic echo 로 흐름을 확인.
메시지 타입 구조도 같이 확인.
빌드 없이 빠르게 publish — ros2 topic pub
테스트할 때 매번 노드 빌드해서 돌리는 건 무거우니까, 터미널에서 직접 publish 하는 방법도 있다:
ros2 topic pub /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.5}, angular: {z: 0.2}}"→ 토픽 동작 검증이나 listener 디버깅에 유용.
4. listener — /cmd_vel 받아서 좌·우 바퀴 속도 계산
이번 일지의 가장 의미 있는 부분. /cmd_vel 의 Twist 메시지를 받아 좌/우 바퀴 속도 로 변환하는 시뮬레이션을 Python 으로 작성했다.
이건 내가 나중에 STM32 에서 C 로 구현할 코드의 Python 버전이다.
미분 구동(differential drive) 키네매틱스:
left = linear.x - angular.z * (wheel_separation / 2)
right = linear.x + angular.z * (wheel_separation / 2)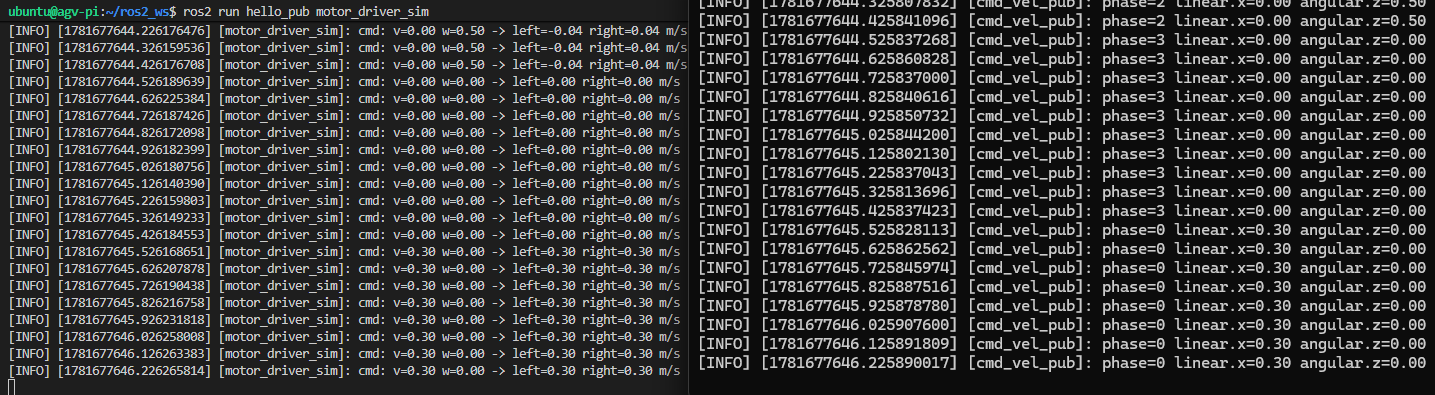
ros2 topic pub 으로 던진 메시지를 listener 가 받아서 좌·우 속도를 계산했다. 전진(linear.x>0) / 좌회전(angular.z>0) 같은 동작을 시뮬레이션 가능. 다음에 STM32 가 같은 일을 할 것.
5. 잠깐 멈춤 — STM32 PWM LED 예제
ROS 쪽은 여기까지. 시간이 좀 남아서 STM32 PWM 으로 LED 끄고 켜기 예제로 손풀기. 예전에 많이 했던 거지만 PWM 감각 살릴 겸.
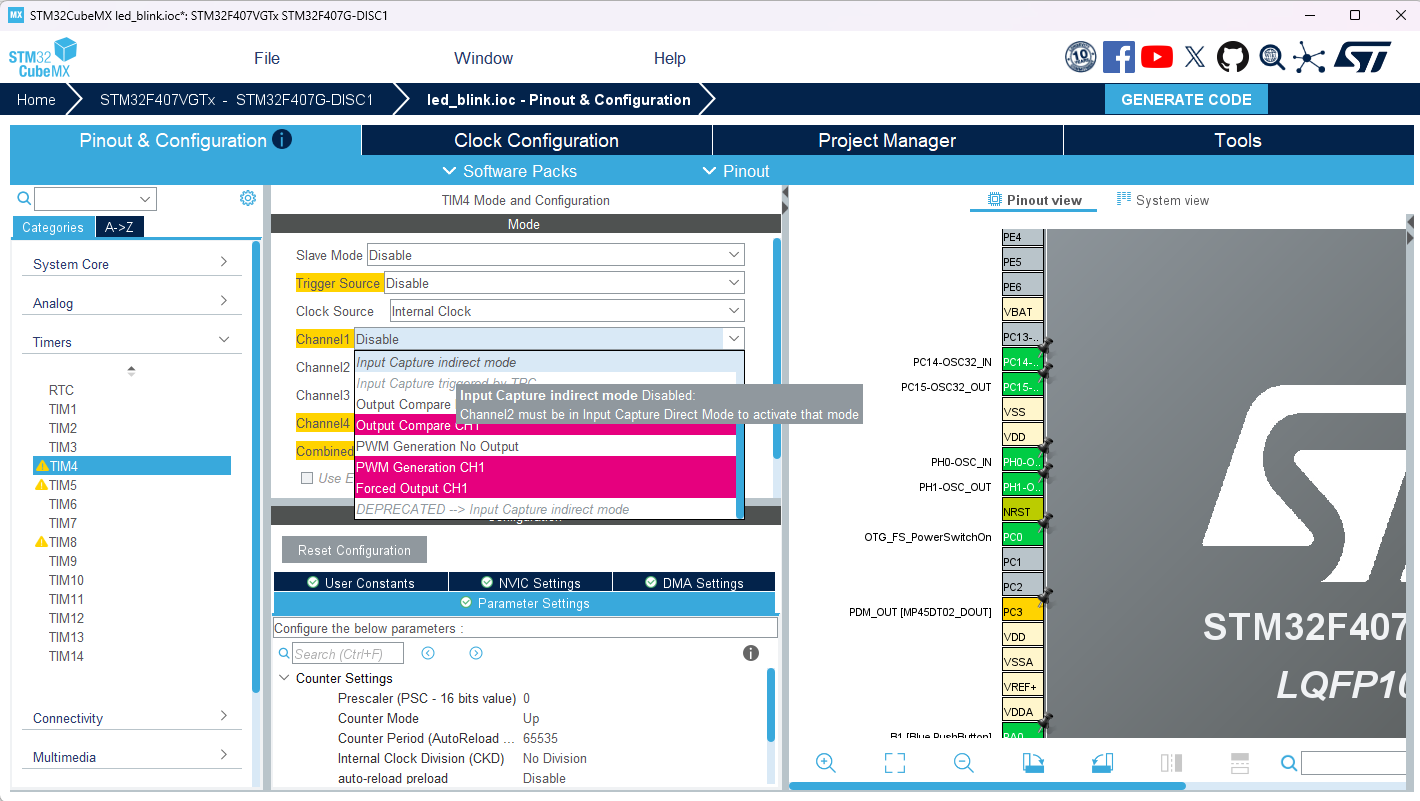
CubeMX 에서 막힌 부분
처음에 타이머 설정에서 PWM Generation CH1 옵션이 비활성 으로 잡혔다. 핀아웃 단에서 PD12~PD15 를 TIM4 의 각 채널에 먼저 할당 했더니 PWM Generation 옵션이 정상적으로 떴다.
Prescaler · Counter Period 계산
목표: 1kHz PWM, 1000단계 분해능.
| 파라미터 | Before → After | 이유 |
|---|---|---|
| Prescaler | 0 → 83 | 타이머 클럭을 1MHz 로: TIM4_clk / (Prescaler+1) = 84MHz / 84 = 1MHz |
| Counter Period (ARR) | 65535 → 999 | PWM 주파수 1kHz + 분해능 1000: 1MHz / (ARR+1) = 1MHz / 1000 = 1kHz |
트레이드오프: Counter Period 를 크게 하면 분해능은 좋아지지만 주파수가 낮아진다. 반대로 작게 하면 주파수는 높아지지만 분해능이 떨어짐. 목적(눈에 안 보이는 부드러운 LED 디밍)에 맞춰 1kHz/1000단계로 균형.
결과 — LED 순환 점등
main.c 를 수정해서 PD12 → 13 → 14 → 15 순으로 PWM duty 를 올렸다 내렸다 하도록 했다.
오늘 한 것
- ROS2 핵심 어휘 정리 (Node / Topic / Publisher / Subscriber / Message)
- 첫 talker 노드 작성,
chatter토픽으로 발행 확인 geometry_msgs/Twist로/cmd_velpublish & echo- listener 로
/cmd_vel수신 → 좌·우 바퀴 속도 변환 (Python 버전, 차후 STM32 C 포팅 예정) - STM32 TIM4 PWM 설정 (1kHz / 1000단계) + LED 순환 점등 확인
다음 할 것 (USB-UART 컨버터 도착 후)
- USB-UART 컨버터 납땜 + UART 통신 확인 (Pi 5 ↔ STM32)
- 모터 드라이버 결선 + 첫 모터 회전
- ROS2 listener 의 좌·우 속도 출력을 UART 로 STM32 에 전달 하는 첫 통합
더 공부해볼 것
1. ROS2 미들웨어 (DDS)
- 왜 ROS1 (TCP/UDP 기반) 에서 DDS (Data Distribution Service) 로 옮겨갔는지
- 토픽 발행이 어떻게 자동 디스커버리 되는가 (multicast 기반)
- QoS(Quality of Service) 설정 — Reliable vs Best Effort, History depth 등
2. Twist 메시지의 6 자유도
linear.x/y/z+angular.x/y/z= 6 DOF- 차륜형 로봇은 보통
linear.x(전진) +angular.z(yaw 회전) 만 씀 - 드론처럼 3D 자유 이동 로봇은 6 자유도 다 활용
- 차륜이지만 옴니휠/메카넘휠 쓰면
linear.y까지 추가
3. 미분 구동 키네매틱스 정밀화
- 단순 공식
left/right = lin ± ang * (L/2)의 한계 - 휠 슬립, 베이스 폭(
wheel_separation) 의 실측 보정 - 인코더 피드백으로 closed-loop 제어 (PID)
- odometry — 휠 회전 정보로 위치 추정
4. STM32 PWM 심화
- 1kHz 외의 흔한 PWM 주파수 — 모터: 10–20kHz (가청 노이즈 회피), LED 디밍: 1kHz 이상 충분
- Dead time — 모터 H-bridge 에서 상보 PWM 출력 시 short-through 방지 시간
- DMA + PWM — CPU 부담 없이 패턴 재생 (LED 매트릭스, WS2812 등)
5. UART → RS485 변환
- 다음 편의 핵심 주제. UART (point-to-point) 와 RS485 (multi-drop) 의 차이
- MAX485 같은 트랜시버 IC 의 동작 (driver enable, half-duplex)
- 산업 표준 프로토콜 — Modbus RTU 가 RS485 위에 흔히 올림
회고
ROS2 의 talker → /cmd_vel → listener 흐름에서 left/right 값이 실제로 계산되는 순간 이 오늘의 하이라이트. 그동안 추상적이던 “자율주행 로봇이 명령을 어떻게 받는가” 가 Twist 메시지 한 줄로 구체화 됐다. STM32 쪽에서 같은 로직을 C 로 옮기는 작업이 다음 편의 핵심.
시리즈가 트랙으로 잡혀가는 느낌이 든다. 1편(설치) → 2편(첫 노드) → 3편(통합) 순서로 자연스럽게 연결되고 있다.