포트폴리오용 자율주행 자동차 사이드 프로젝트를 시작했다. 거창하진 않고, 라즈베리파이 5 위에서 ROS2 를 굴리고 RS485 통신으로 모터 제어를 해보는 정도. 오늘이 1편이다.
약어 풀이
- AGV (Autonomous Guided Vehicle): 산업용 자율주행 운반 로봇의 표준 용어. 본 프로젝트의 컨셉
- ROS2 (Robot Operating System 2): 로봇 소프트웨어 표준 미들웨어. 노드 간 메시지 통신·서비스·액션 제공
- RS485: 산업용 시리얼 통신 규격. 노이즈에 강하고 다중 장치 연결(half-duplex) 가능
Table of contents
Open Table of contents
하드웨어 구성
- 메인 보드: 라즈베리파이 5 (Pi OS 64-bit Desktop)
- MCU: STM32 — 모터 제어 / 센서 인터페이스 담당
- 통신: Pi 5 ↔ STM32 = UART (장기적으로 RS485 변환)
- (보류) Jetson Nano: SLAM · 비전을 같이 넣고 싶었는데 너무 구형이라 다른 프로젝트로 미룸
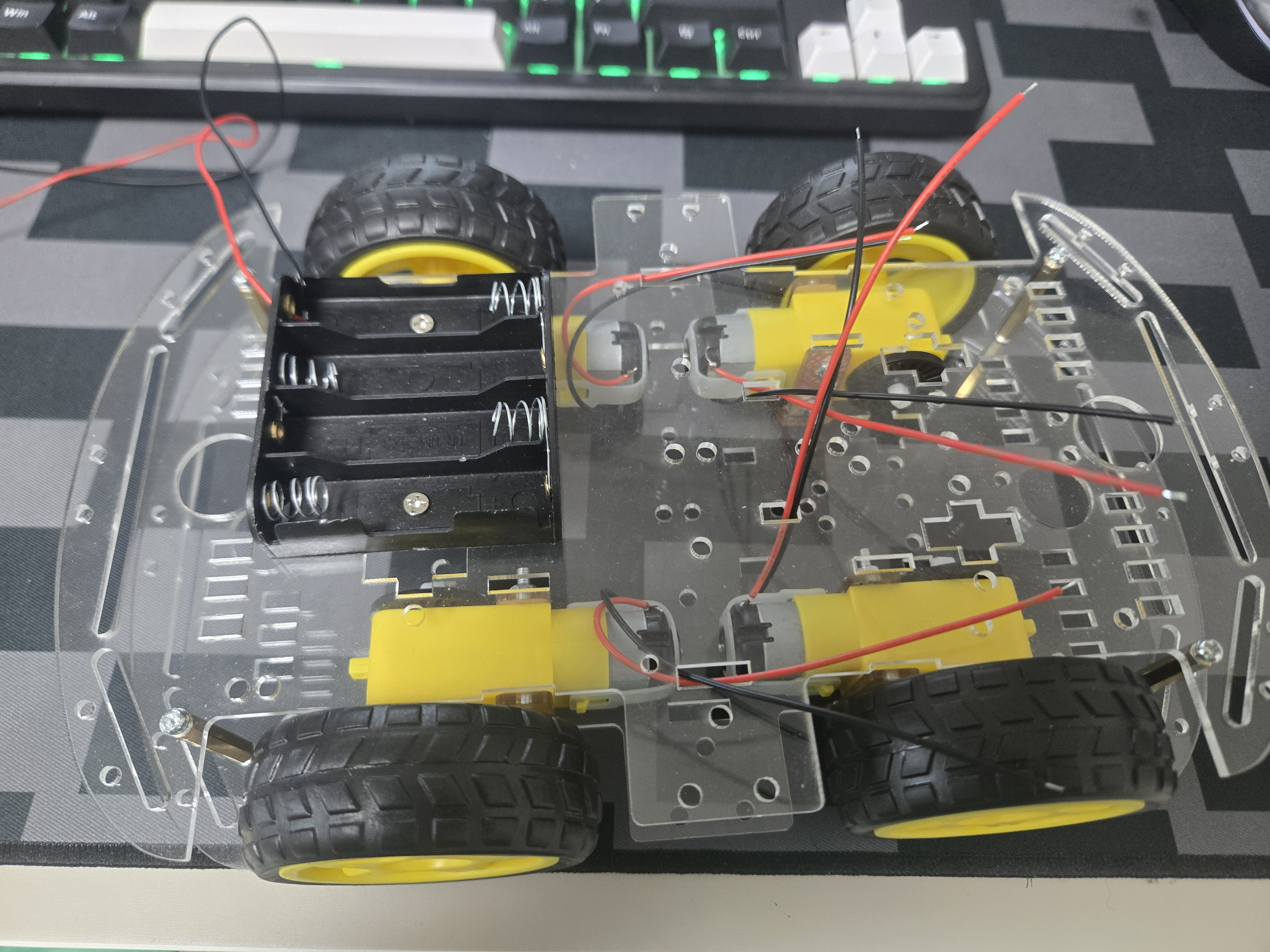
1. 프레임 조립 — 오랜만의 납땜
오래전에 주문해놓고 방치했던 프레임을 오늘 꺼냈다.
납땜기로 집에서 납땜하고 나사를 조였다. 오랜만에 잡은 인두라 그런지, 집에서 처음 납땜한 것도 처음이라, 뭔가 냉납된 것 같은 느낌이 살짝 있긴 하다. 일단 고정은 됐으니 동작 확인 단계에서 다시 판단할 예정.
2. 회상 — STM32 환경 세팅은 기록을 못 했다
엊그제 STM32CubeIDE + CubeMX 환경을 세팅하고 LED 까지 깜빡였는데, 그때는 기록하는 습관이 안 잡혀서 로그를 못 남겼다. 이제부터는 작업할 때 이렇게 로그 파일을 열어놓고 진행하기로. 그래야 내가 개발한 흐름을 빠짐없이 기록할 수 있다.
(STM32CubeIDE 2.0부터 CubeMX 가 분리된 이슈는 이전 글 에 별도로 정리해뒀다.)
3. 오늘의 블로커 — USB-UART 컨버터
UART 기능을 테스트해보려고 했는데 USB-UART 컨버터가 없어서 주문 대기. 오늘이 아니라 내일 도착이라 😢, 그 사이에 다른 작업으로 우회.
4. 라즈베리파이 5 OS 세팅
배터리 쪽 조립도 절연테이프·열수축 튜브가 없어서 막혔고, 멀티미터 배터리까지 떨어져서 — Pi 5 쪽 세팅으로 방향 전환.
Raspberry Pi Imager 로 OS 굽기 시작. 그런데 사용자 지정(advanced options) 탭에 불이 안 들어왔다.
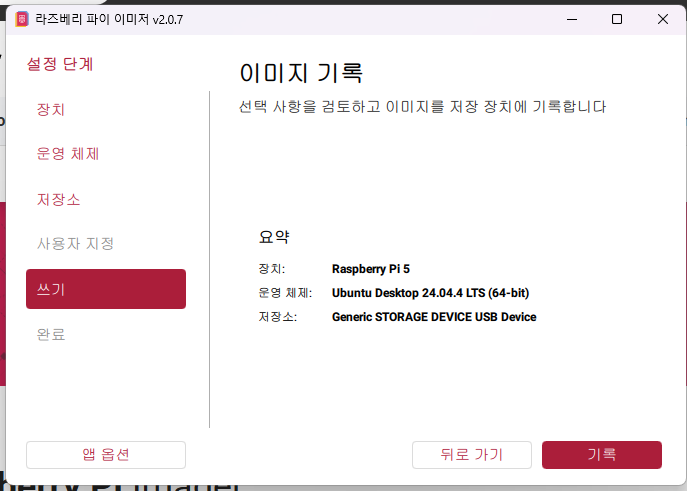
서버 버전을 선택한 줄 알았는데 데스크탑 버전을 선택한 초보적 실수. 일부 옵션이 데스크탑 이미지에선 의미가 없어서 탭 자체가 비활성화된 것.
OS 종류 다시 확인 후 진행.
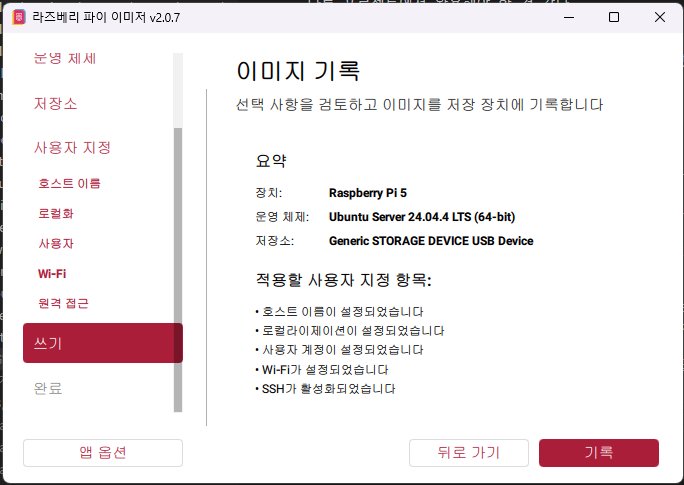
5. 첫 부팅 + SSH 연결
전원 연결 직후 — 처음에는 녹색 LED 가 깜빡이지도 않고 그냥 켜졌다. 뭔가 이상해서 한번 전원 빼고 재시도. 두 번째엔 정상적으로 깜빡였다.
LED 깜빡임이 끝난 후 부팅이 완료됐다고 판단해서 SSH 연결 시도. 그런데 또 막힘.
WiFi 네트워크 mismatch: Pi 5 의 WiFi 는 거실 공유기 SSID 로 설정했는데, 정작 내 데스크탑은 다른 공유기와 랜선으로 연결돼있어서 같은 네트워크가 아니었음. 둘 다 같은 네트워크로 정렬한 뒤 SSH 연결 확인.
6. ROS2 Jazzy 설치
업데이트·업그레이드 후 리부트. 본격적인 ROS 작업 진입.
순서대로:
- 로케일 UTF-8 확인
- Universe repository 활성화
- ROS2 GPG 키 + 저장소 추가
ros-jazzy-desktop설치
그런데 4번에서 막힘. 의존성이 깨져서 설치 실패.
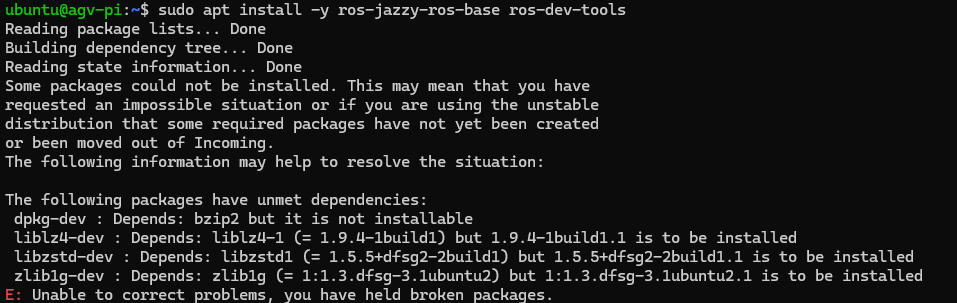
원인 파악:
apt update출력에noble,noble-security만 잡혀있고noble-updates저장소가 빠져있음- 그래서 일부 dev 패키지의 일치 버전을 못 받아와서 의존성이 안 맞음
해결:
noble-updates저장소를 sources 에 추가sudo apt update && sudo apt upgrade로 누락된 업그레이드 적용- 이후
sudo apt install ros-jazzy-desktop다시 시도 → 성공
7. ROS2 워크스페이스 셋업
colcon build 등 기본 워크스페이스 세팅 진행. build/, install/, log/ 폴더가 정상적으로 생성된 것까지 확인.
(여기서부터 실제 ROS 노드를 작성하는 건 다음 편에서 — 일단 환경만 세웠다.)
추가로 알아본 것
Universe repository 가 뭔가
Ubuntu 의 소프트웨어 저장소(repository) 4종 중 하나.
| 저장소 | 성격 |
|---|---|
| Main | Canonical 이 공식 지원 + 보안 업데이트 책임지는 자유 소프트웨어 |
| Universe | 커뮤니티가 유지보수하는 자유 오픈소스 |
| Restricted | 독점 드라이버 등 |
| Multiverse | 라이선스/법적 제약 있는 소프트웨어 |
ROS 설치 과정에서 Universe 가 등장하는 이유: ROS 가 의존하는 일부 패키지가 Universe 에 있기 때문. ROS 공식 설치 가이드에 활성화 단계가 명시돼있다.
GPG 키가 뭔가
패키지의 출처와 무결성을 검증하기 위한 암호화 서명 키.
apt install 할 때 “이 패키지가 정말 ROS 공식 저장소에서 온 게 맞는지” 를 검증하는 용도. GPG 키 없이는 (또는 키가 깨졌으면) apt 가 안전성 보장을 못 해 설치를 거부한다.
오늘 한 것
- AGV 프레임 조립 (납땜 + 나사 조임)
- Raspberry Pi 5 OS 설치 (사용자 지정 포함 재시도)
- Pi 5 첫 부팅 + SSH 연결 (WiFi mismatch 해결)
- ROS2 Jazzy 설치 (noble-updates 누락 → 추가 해결)
- ROS2 워크스페이스 기본 셋업 (
colcon build동작 확인)
다음 할 것 (USB-UART 컨버터 도착하면)
- STM32 ↔ Pi 5 UART 통신 테스트 (간단한 echo 또는 LED 토글 명령)
- ROS2 첫 노드 작성 — publisher / subscriber 패턴 익히기
- 배터리 회로 조립 (절연테이프·열수축 튜브 마련 후)
더 공부해볼 것
1. ROS2 핵심 개념
- Node / Topic / Service / Action 의 차이와 언제 어떤 걸 쓰나
- DDS (Data Distribution Service) — ROS2 의 underlying 통신 미들웨어
- rclpy vs rclcpp — Python 노드 vs C++ 노드 작성 비교
- 참고: ROS2 공식 튜토리얼
2. RS485 통신
- UART 와 차이 (전기적 신호 방식: TTL vs differential)
- half-duplex 의 의미와 마스터/슬레이브 패턴 설계
- Modbus 프로토콜 (RS485 위에 흔히 올림)
- Pi 5 의 UART → RS485 변환 모듈(MAX485 등) 회로
3. SLAM / 비전 — 나중에 다시 도전
- Jetson Nano 가 너무 구형이라 보류했지만, Pi 5 + Pi Camera 만으로도 가능한 경량 SLAM 패키지 (RTAB-Map, Cartographer 등) 검토
- 또는 별도 가속기(Coral USB, Hailo) 활용
4. 운영 관련
- 라즈베리파이 부팅 패턴(녹색 LED 횟수)의 의미 — 표준 부트 로그 시퀀스가 정의되어 있음
- 시스템d 서비스로 ROS2 워크스페이스 자동 source 등록
colcon build성능 옵션 (--symlink-install,--parallel-workers)
5. 냉납 검증
프레임 조립 때 의심됐던 냉납 부분을 어떻게 검증할까
- 멀티미터로 도통 확인 (저항 측정)
- 부하 걸었을 때 발열·전압강하 측정
- 재납땜 시 인두 온도 / 플럭스 사용 노하우
회고
첫 사이드 프로젝트 일지라 톤을 어디까지 풀어야 할지 고민했는데, 시행착오를 그대로 남기는 게 가장 가치 있다는 결론. ROS2 의존성 깨짐 같은 건 정확히 같은 검색어로 막힌 사람들이 분명 있을 거고, 작성자 본인도 다음에 다른 보드에서 ROS 깔 때 이 글이 가장 빠른 참고가 될 것.
STM32CubeIDE 글 에서 시작된 자율주행 트랙이 이제 본격적으로 줄기를 잡기 시작했다. 다음 편은 UART 통신 테스트부터.